编辑:无损检测证书挂靠网 时间:2025-01-21 19:50:19
张海山(1969—),男,工程师,主要从事铁路轨道线路大修、维修以及钢轨探伤专业管理等工作
当前的机械化钢轨检测设备,无论是检测速度高达80 km·h-1的大型钢轨超声检测车、检测速度达15 km·h-1的双轨式钢轨超声检测仪还是检测速度为3~5 km·h-1的手推式钢轨超声检测仪,都采用的是70°、37°及0°探头的组合,这种探头组合能够有效地对钢轨母材进行检测。但是对于钢轨焊缝的检测,当前的机械化检测设备还不能达到标准TB/T 2658.21—2007《工务作业第21部分:钢轨焊缝超声波探伤作业》的要求。这主要体现在以下两个方面:其一,对于垂直于钢轨上表面的伤损,机械化的钢轨检测设备都不能进行检测,因此在钢轨焊缝检测作业中,需按照标准TB/T 2658.21—2007的要求采用双探头对轨头轨腰实行串列式扫查。根据标准产生了各种串列式扫查方式和工具[1]。但是这些扫查都是基于手持仪器进行的,检测效率很低。虽然有些手推车增加了串列式扫查功能,但是需要采用多达10个滑靴式探头,推行阻力很大,维护保养的难度也大,而且检测速度也只能达到3 km·h-1,探头数量多也导致其耦合效果较差。其二,对于轨底角区域,也就是通常所说的钢轨检测的第三区,由于超声波从轨面发射,不能到达轨底脚区域,故当前的机械化检测设备不能对轨底角区域进行检测。根据标准TB/T 2658.21—2007,对钢轨轨底角区域应采用单探头或者双探头进行手工检测。
针对当前机械化检测设备无法有效检测钢轨焊缝两处位置的难点,研发了一套双轨式钢轨母材焊缝综合检测系统。首先,研发了一套轮式探头串列式扫查系统,并将其安装于双轨式钢轨超声波检测仪上[2-3],检测速度可达15 km·h-1,轮式探头保证了检测过程中良好的耦合性。该设备不仅保证了对垂直伤损的检出能力,而且在对钢轨母材检测的同时可完成焊缝检测作业中要求的串列式扫查。其次,研发了一套轨底的焊缝检测系统,同样采用轮式探头,安装有双轨式钢轨超声检测仪,可以实现钢轨焊缝轨底的快速检测。
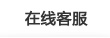
首先设计能应用于双轨式钢轨超声检测仪的串列式扫查系统,实现对垂直伤损的检出功能。当前37°探头及70°探头不能有效地检出轨腰及轨头的垂直裂纹。双轨式检测仪的37°探头只能检测轨腰的倾斜裂纹、螺孔裂纹和轨底横向裂纹(月牙伤),但对于轨底20 mm以上的垂直裂纹几乎无检测能力,其原因为伤损回波会落到探头后面(或前方),探头无法接收到信号,该情况下的声束路径如图1所示。
针对图1中所示的垂直裂纹问题,如果增加探头,通过轨底的反射,将处于不同高度的垂直裂纹通过不同的发射和接收组合,就可以检测到钢轨中任意深度的垂直裂纹。为此可以把钢轨检测区域沿竖直方向均匀划分为多个扫查高度h,每个扫查高度对应一个用于接收垂直伤损反射信号的接收探头和发射探头,若钢轨的深度为H,
串列式扫查发射和接收声束路径如图2所示,图中将国内常用的60轨均分成17等份,每一等份的扫查高度是10 mm。发射探头和接收探头均设置在钢轨的上表面,发射探头1发出的超声波信号沿发射路径A行进,遇到检测区域内某一高度D处的垂直伤损后会发生镜面反射,反射信号沿发射路径B行进至钢轨底面再次发生镜面反射,沿接收路径C行进被对应的接收探头7接收,分析接收探头7接收到的超声波信号即可得到伤损位置等信息,以便及时对不合格轨道进行更换;在此基础上为发射探头1设置了接收探头3~10来接收其在不同高度处遇到的垂直伤损反射信号(发射探头2也作接收用),同样为发射探头2设置了接收探头3~10接收其在未被发射探头1覆盖的多个高度处遇到的垂直伤损反射信号,因此用2个发射探头和8个接收探头的组合覆盖了17个高度的伤损检测,同时由于超声波声束的扩散性,实际上该方案能够覆盖整个钢轨的高度。
图2中17个节点离轨底面的高度分别为10,20,……,170 mm,对应的发射接收组合分别是1→2,2→3,1→3,2→4,1→4,2→5,1→5,2→6,1→6,2→7,1→7,2→8,1→8,2→9,1→9,2→10。图2中每一个路径都是等距离的,以60钢轨为例,如果入射角为38.65°,从发射到接收的时间则为140 μs,最简单的触发时序就是按照前面所描述的发射接收组合,每隔140 μs,依次发射和接收。通过FPGA(现场可编程门阵列)进行时序控制很容易实现该过程,但累积的时间太长会导致扫查重复频率太低。故可在探头1发射后的30~40 μs,接着触发探头2,形成一种嵌入式发射接收模式,重复频率可提高一倍。
通过该垂直伤损检测系统,可实现对检测区域内所有高度的全面扫查,将检测系统固定于能在轨道上行驶的检测车辆上,将探头放置于轨道表面,通过车辆的行走即可对整个轨道内选定的垂直检测区域进行连续全面扫查。
轮式探头具有耦合好、能够适应各种不同的复杂线路的优点,故采用轮式探头实现垂直伤损检测。但是如果按照图2所示的探头布局设计轮式探头,轮式探头的数量会过多而导致现场安装使用较为困难。通过简单的枚举分析,发现当5个探头发射,2个探头接收时,探头的数量最少且声束能对钢轨缺陷形成覆盖,其发射和接收声束路径示意如图3所示。
图3中,探头5既做发射用也做接收用。在这种设计下,探头之间的组合关系及发射接收时序为4→5,3→5,2→5,1→5,5→6,4→6,3→6,2→6,1→6,5→7,4→7,3→7,2→7,1→7。
前面5个探头由于相互之间的距离比较小,可以将其组装设计在一个直径为8.5英寸(21.59 mm)的轮式探头里面,其中各探头之间的距离可以通过简单的三角函数关系计算。结合常规母材检测的轮式探头可形成一套采用轮式探头的串列式检测系统(见图4),检测系统外观如图5所示,其检测速度可达15 km·h-1。

当前的机械化检测设备的超声波从轨面发射,因此只能检测钢轨头部、轨腰及轨底位于轨腰投影区域,其声束覆盖示意如图6所示。
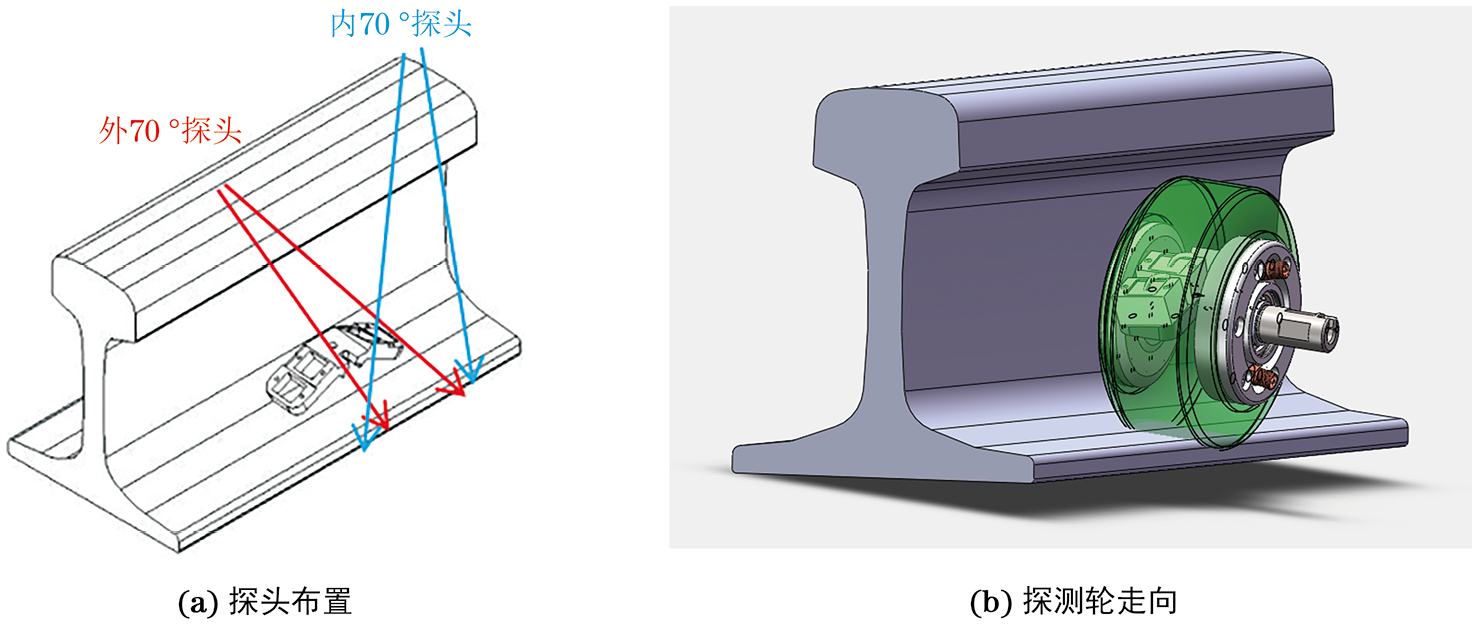
针对图6中出现的检测盲区,基于双轨仪的检测平台,采用在单轨内外侧各设置一个轮式探头的方法使钢轨两侧的轨底角区域都能被检测到,在单侧轨底角设置2个朝前发射的70°探头和2个朝后发射的70°探头对轨底角进行检测。轨底焊缝探轮设计如图7所示。
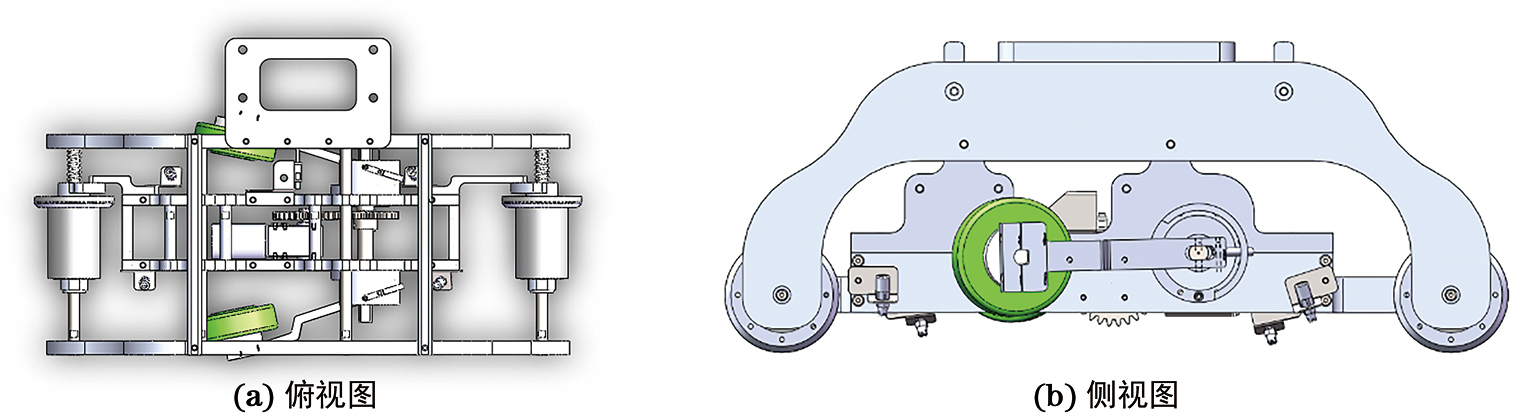
为了将图7中的轮式探头应用于双轨式钢轨超声检测仪,并实现对轨道焊缝的快速检测,设计了机械臂实现轮式探头的快速升起和放下,轨底焊缝探轮支架收起状态时的检测系统结构如图8所示。
现场作业时,轨底焊缝轮式探头在不检测的情况下上收,当双轨检测仪行进到焊缝处时,通过手柄开关将轮式探头下放,对轨底焊缝进行检测,检测完成后再通过手柄开关将轮式探头上收,其检测现场如图9所示。

试验验证分为以下两部分:在相关的钢轨焊缝试块上进行验证;在役钢轨现场验证。
为验证所设计的轮式探头串列式扫查装置及轨底伤损检测装置的有效性,首先进行试块验证,这些试块既可以是行业内的标准试块,也可以是自行设计的试块。
在钢轨焊缝检测作业标准TB/T 2658.21—2007中,GHT-1a试块用来设置焊缝检测K型扫查的灵敏度。采用轮式探头串列式扫查装置检测GHT-1a试块轨端的平底孔,其B扫描显示如图10所示。
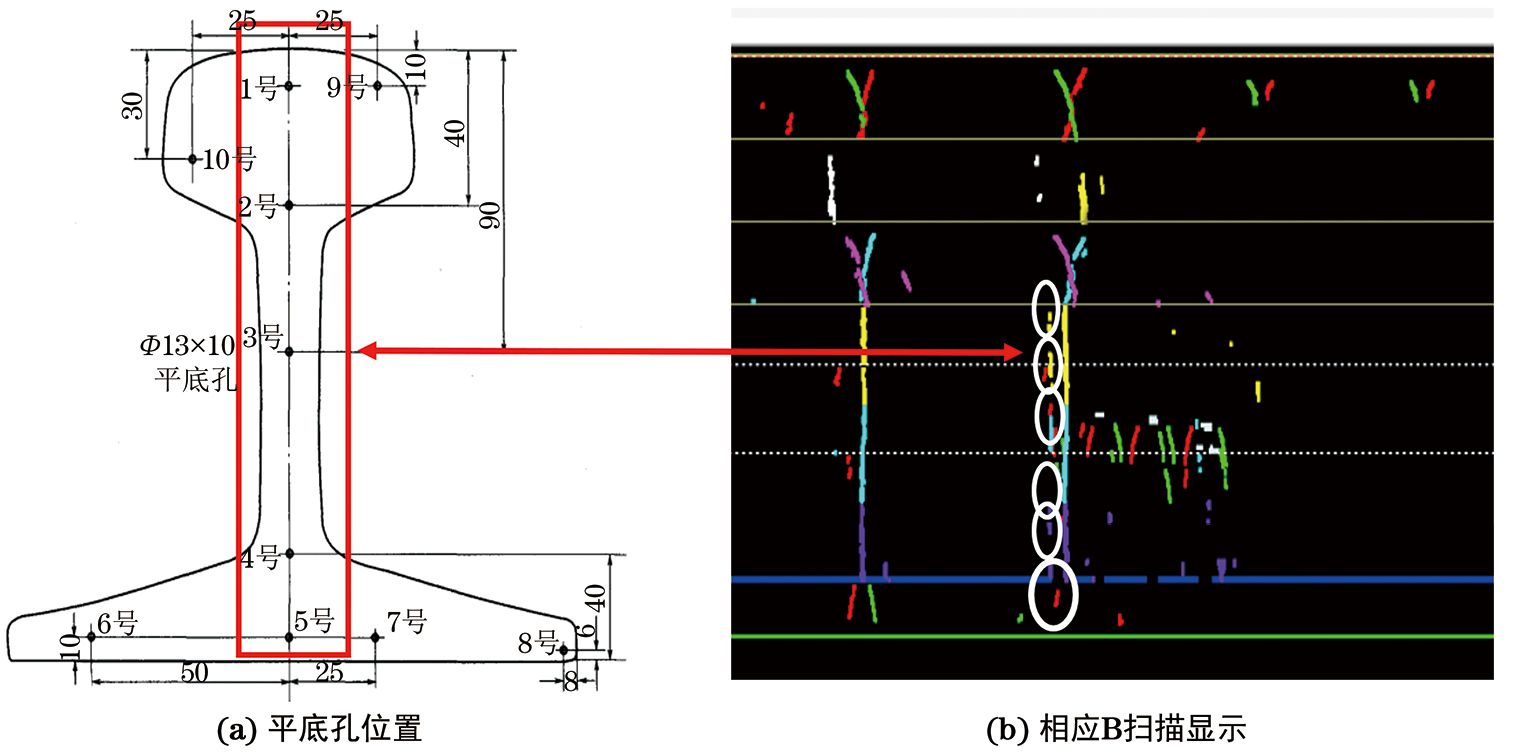
GHT-1a的轨端有5个直径为4 mm,深为40 mm的平底孔,这5个平底孔的底面和钢轨的上表面垂直,可以模拟和钢轨上相同位置的φ4 mm伤损,由图10可见,5个平底孔显示清晰。
在标准TJ/GW 157—2017《双轨式钢轨超声波探伤仪暂行技术条件》中的GTS-60SG-3双轨试块除了含有轨端平底孔外,还含有轨腰垂直裂纹。轮式探头串列式扫查装置检测GTS-60SG-3试块的B扫描显示如图11所示。
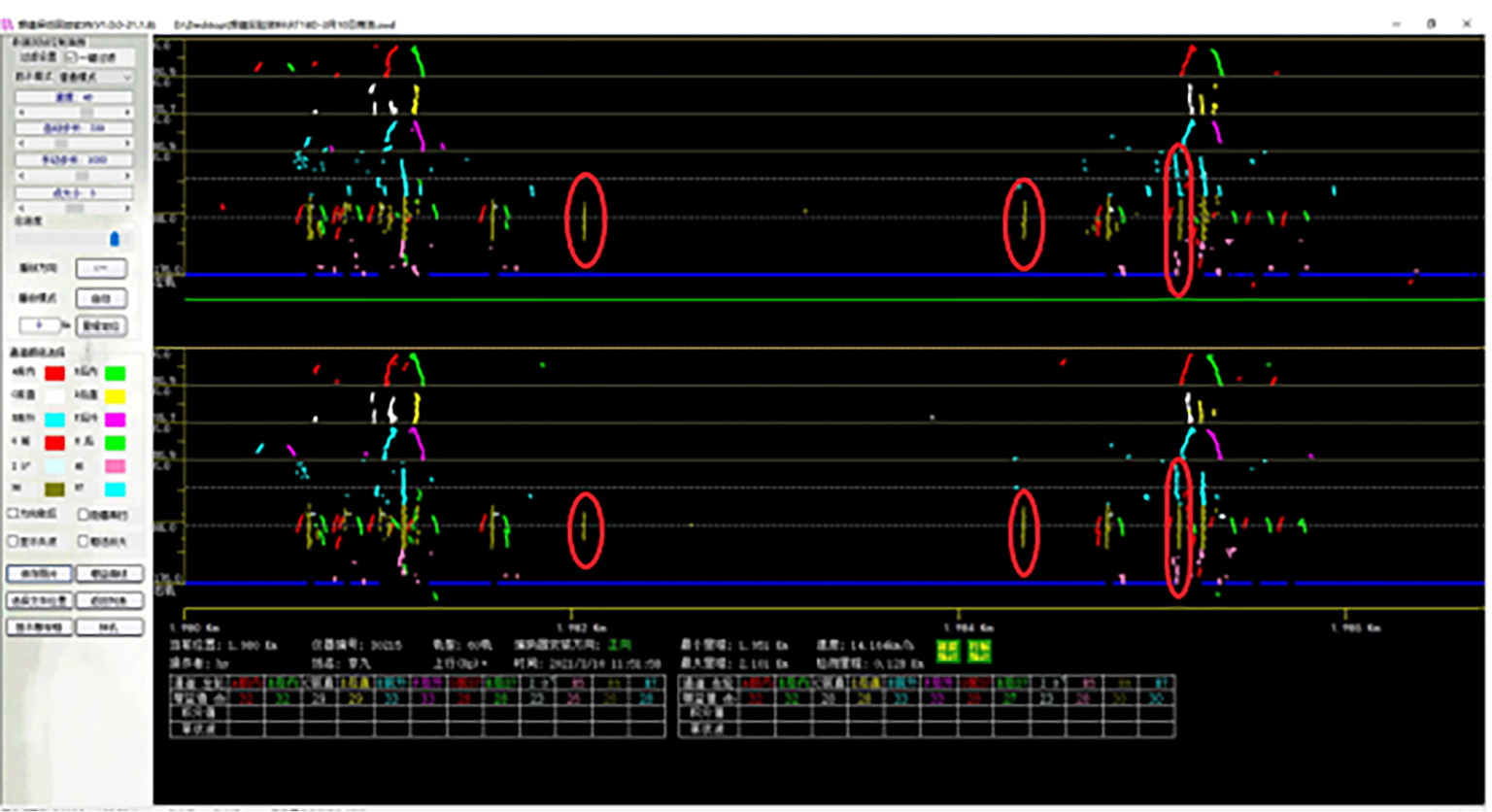
由图11可见,GTS-60SG-3试块上的垂直裂纹及轨端的平底孔都能清晰地显示出来,而当前的机械化钢轨检测设备是不能检测出这些伤损的。以上的垂直伤损都位于钢轨母材上,钢轨铝热焊YN-1试块上3处伤损的B扫描显示如图12所示,可见伤损的扫描显示非常清楚。
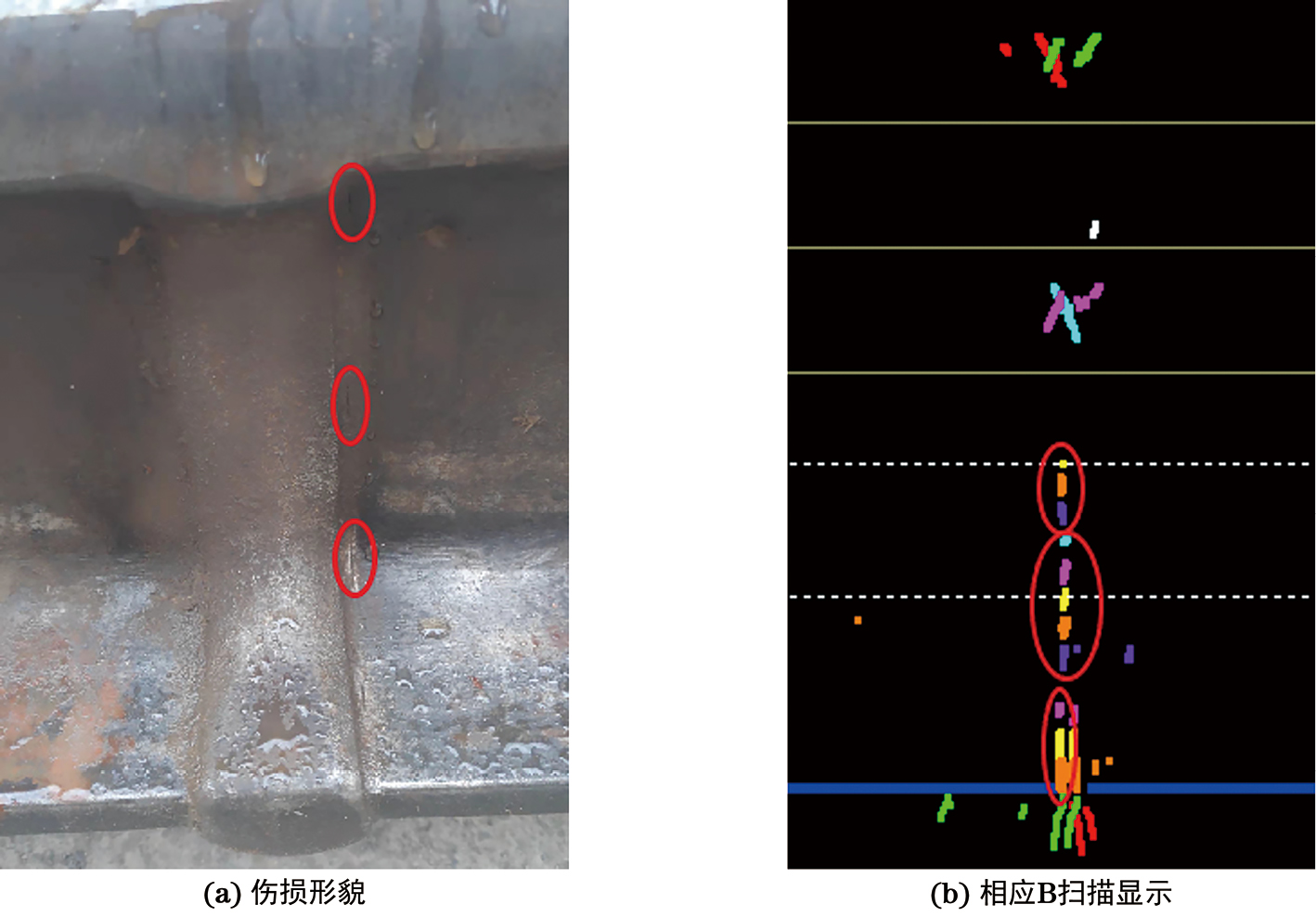
轨底轮式探头检测疑难试块轨底角5号伤损(左上)及一个自制试块的轨底角刻槽伤损(右上)的B扫描显示如图13所示。
3.2 现场验证及检测效果
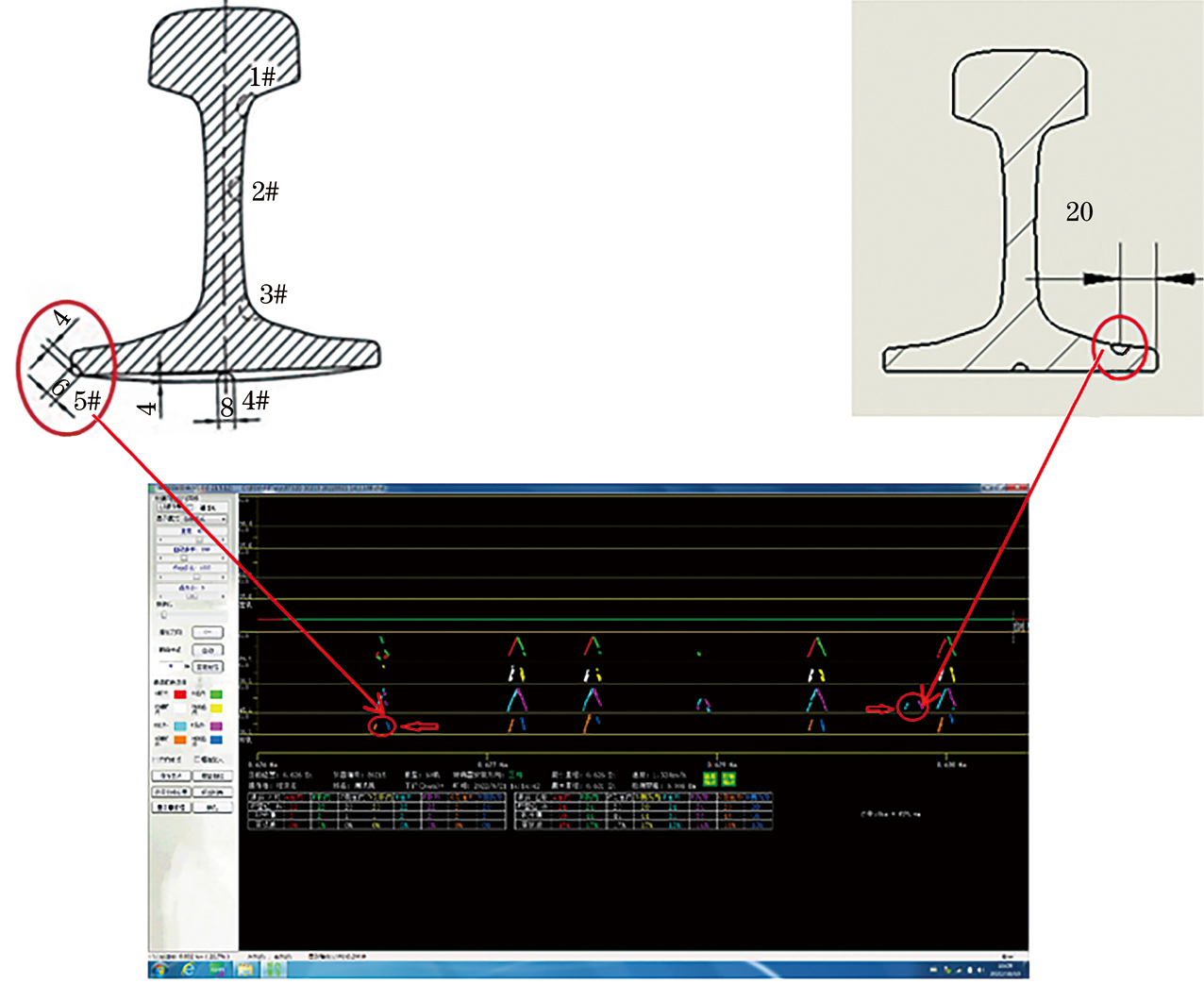
安装了轮式探头串列式扫查的双轨检测仪在现场使用中也取得了良好的效果。2023年3月,相关单位利用轮式探头串列式扫查在太焦线某处发现一铝热焊伤损,该伤损显的B扫描示如图14所示。
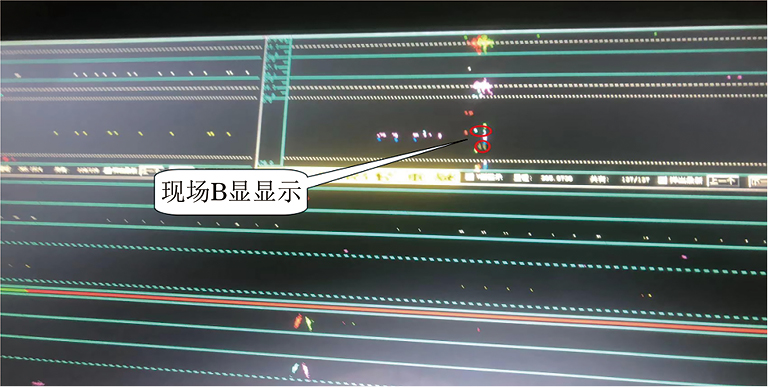
从图14可以看出,该伤损显示紧靠铝热焊焊筋显示。现场用小仪器进行复核,也证实了该伤损的存在,小仪器进行复核的A扫描波形如图15所示。

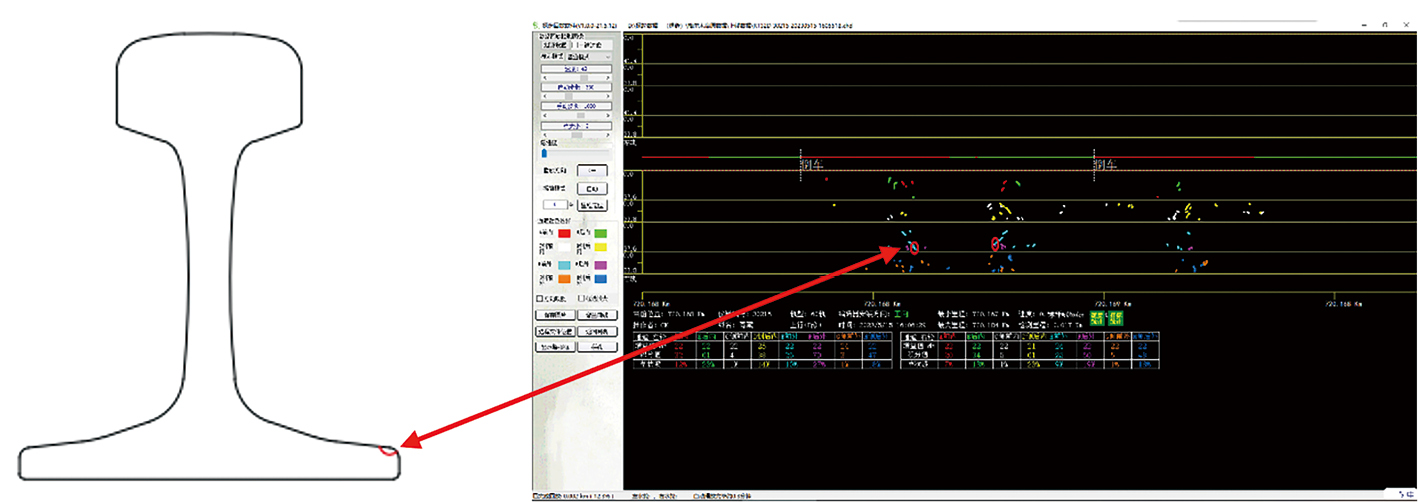
安装了轨底焊缝扫查功能的双轨仪在现场同样发现了伤损,在青藏线某处发现的一处左股外侧轨底角击伤伤损显示如图16所示,在青藏线某处发现的一处左股铝热焊内侧轨底角气孔伤损显示如图17所示。
提出一种钢轨自动化全断面焊缝检测轮式检测仪,阐述了其设计原理及实现方法,并研制了样机。检测系统的研发分两步来实施,首先在双轨仪的基础上增加了采用轮式探头的串列式扫查装置,实现了对钢轨中与上表面垂直伤损的检出,检测速度达15 km·h-1,解决了当前机械化检测设备对此类伤损检出能力不足的问题。系统采用5发2收的模式进行轮式探头串列式扫查,保证了轮式探头设计的现场实用性。其次,设计研发了轨底焊缝扫查的支架与轮式探头,并设计了可以旋转的机械臂。轮式探头采用4个通道,每根钢轨两侧各一个探轮,双轨合计4个探轮,实现了对轨底检测区域的全面覆盖。轨底轮式探头的良好耦合性可以克服轨底锈蚀油污带来的影响,同时轮式探头可以直接越过焊缝进行快速检测,所提检测系统为钢轨的高速全自动无损检测提供了一些参考。