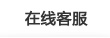
图 1 超声横波三维成像仪实物及超声波传播路径示意
编辑:无损检测证书挂靠网 时间:2024-12-24 17:26:17
作者简介:
陈承申(1985—),男,硕士,高级工程师,主要从事混凝土无损检测技术的研究工作
混凝土结构在建设期常出现分层离析、蜂窝、空洞等缺陷,在服役期可能产生裂缝、粉化等疲劳劣化损伤。目前,混凝土结构质量检测的常规手段有探地雷达、回弹、冲击回波、钻孔取芯等,随着混凝土结构尺寸越来越大、内部钢筋愈发密集,其病害形态呈现多样化、复杂化趋势,对检测精度提出了更高的要求。超声横波三维成像法已成为当前国内外混凝土结构内部缺陷无损检测的前沿技术,该技术基于超声波在结构内部传播过程中遇到波阻抗差异界面时产生反射波的特性,采用阵列方式排布多道传感器,获取大量数据,利用脉冲回波技术与合成孔径聚焦技术(SAFT),实现混凝土结构内部缺陷和形态的高精度三维成像,解决了超声波反射法中声波易受干扰、传播方向性差等问题。
文章通过对地铁隧道管片、钢管混凝土等混凝土预制结构开展检测试验,分析影响超声横波三维成像技术检测结果精度的因素,提高了该技术的工程应用水平。
超声横波三维成像技术通过阵列传感器,将信号采集方式从一、二维拓展至三维,采用“一发多收”的方式进行检测。检测时,采用干点接触式耦合超声传感器来发射和接收超声横波信号,并采用控制单元对其进行控制。在连续模式下,控制一列传感器进行激发,其他列传感器接收从结构内部界面反射的脉冲信号,超声横波三维成像仪实物及超声波传播路径如图1所示,探头中心频率可在10~100 kHz之间选取。测试所用仪器为德国ACSYS公司生产的MIRA-A1040型超声横波三维成像仪,仪器配备低频宽波段横波传感器矩阵(4行×12列,共48个传感器),传感器列间距为30 mm,行间距为25 mm。
获取阵列数据后,通过对接收到的每个脉冲数据进行滤波处理,创建二维图形模型,根据收发传感器的相对位置和脉冲信号走时,即可计算反射界面的深度(由于脉冲射线路径倾斜,可使用直角三角形边的长度关系公式来计算)。传感器阵列探测原理如图2所示,如果传感器阵列中第n个换能器与缺陷点P之间的距离为dn,与缺陷正上方水平距离为Ln,当传感器阵列与缺陷的垂直距离为h时,三者的关系[1-2]可写为

影响超声横波三维成像技术检测效果的因素包括结构体横波速度的测定、测试频率的选取[1]、测试网格方向的设置。为了研究上述因素对检测效果的影响规律,结合地铁隧道管片模块开展不同参数和采集方式的检测试验,为获取高精度检测数据提供指导。
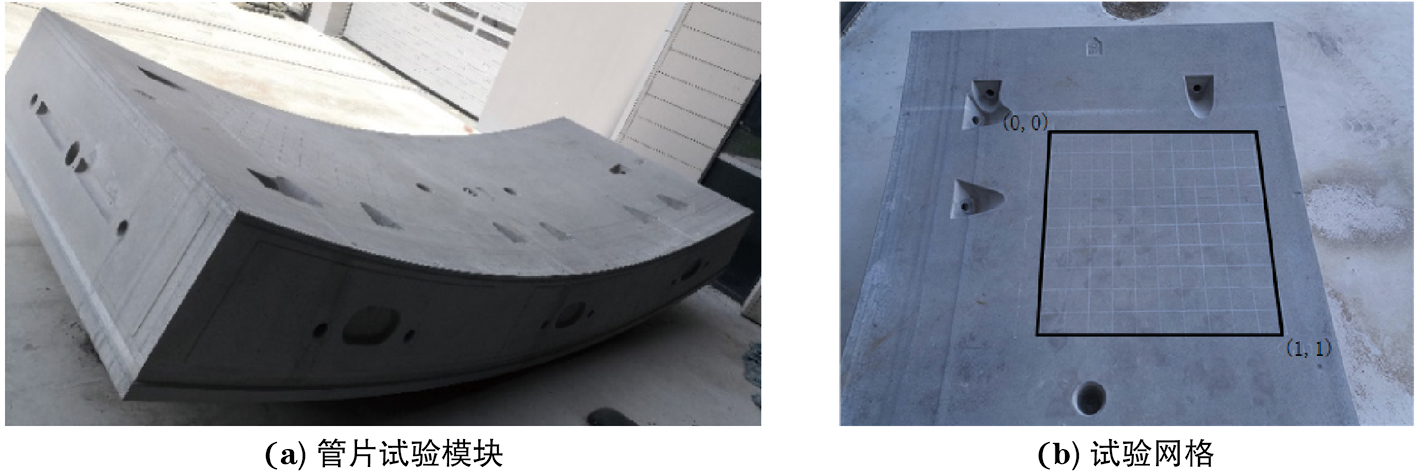
某地铁隧道混凝土管片试验模块及试验网格如图3所示,试验网格尺寸设置为1 m×1 m(长×宽),横纵间隔均为0.1 m,管片厚度为650 mm。
模块局部配筋图如图4所示,图中红色框为测区范围。
待测构件的波速值可以通过预先测定或者在每个测点自动计算来获得,在只有一个工作面的情况下测定构件速度比较困难,通过标准试件测定的数值也存在以偏概全的情况,同时设备在每个测点自动计算得到的波速值受结构表面条件的影响较大,如果表面风化严重,测定的数值往往偏低。文章通过给定的不同波速值检测构件,总结波速对检测结果的影响规律。
笔者统计了设备在每个测点自动计算获取的波速值(以50 kHz中心频率为例),所得测区波速等值线分布如图5所示,可见,测区范围横波速度值Vs为2 990~3 330 m·s−1,平均值
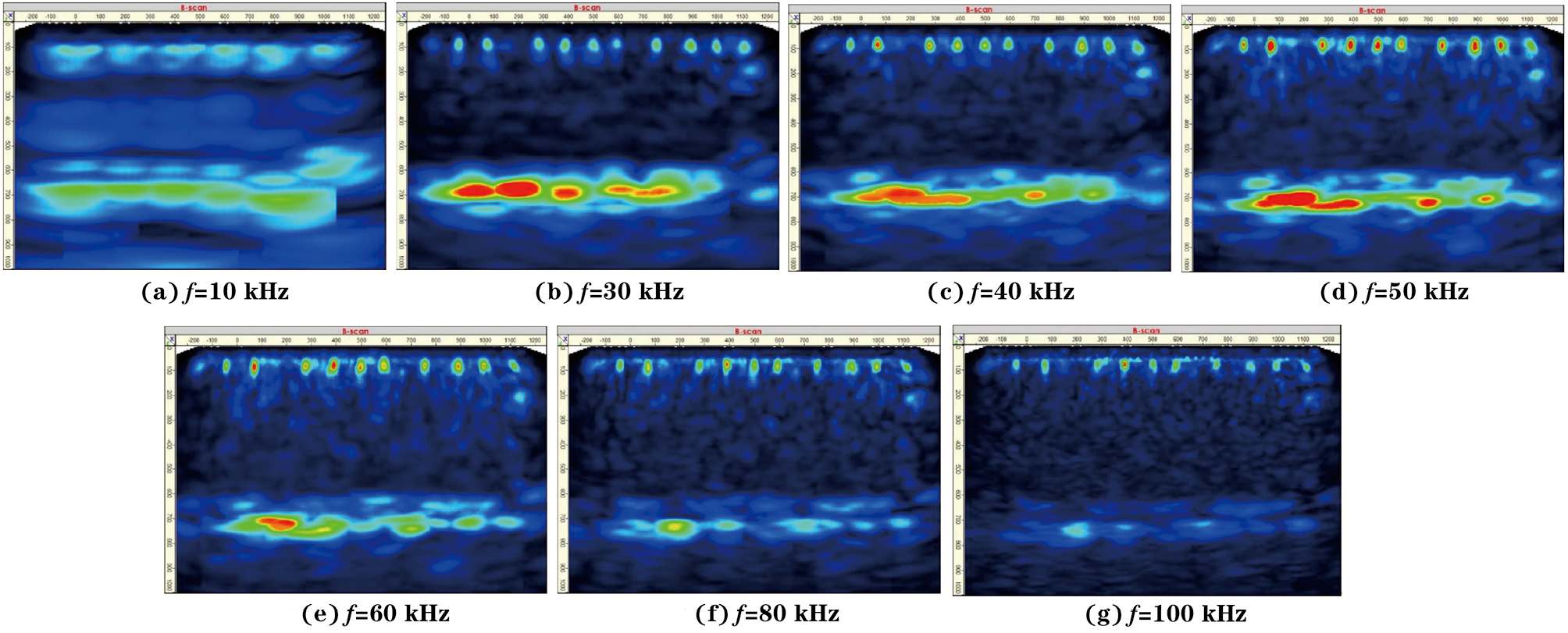
分别预设模块横波速度为2 000,2 500,2 700,2 900,3 200,3 500,4 000 m·s−1开展测试,设置水平网格间隔为0.2 m,垂直网格间隔为0.1 m。得到的不同预设速度下的超声横波剖面图如图6所示。
笔者统计出了在不同预设速度下结构模块的厚度检测值与实际厚度值的差值,其结果如表1所示。由表1可以看出,当预设速度小于实际速度时,厚度检测值比实际厚度小;当预设速度大于实际速度时,厚度检测值比实际厚度大;当预设速度偏大时,检测结果相对偏差更大。当结构整体质量较好时,自动计算速度(平均3 190 m·s−1)与实际速度最接近,检测结果差值最小。当速度设定值偏差较大时,除了检测厚度存在偏差,结构内部分辨率也会降低,钢筋的聚焦效应很差,该速度下的超声横波剖面图如图6(a)所示。
| 序号 | 预设速度/(m · s−1) | 结构厚度检测值/mm | 与实际厚度差值/mm | 差值百分比% |
|---|---|---|---|---|
| 1 | 2 000 | 418 | -232 | -35.7 |
| 2 | 2 500 | 532 | -118 | -18.2 |
| 3 | 2 700 | 576 | -74 | -11.4 |
| 4 | 2 900 | 623 | -27 | -4.2 |
| 5 | 自动计算 | 663 | 13 | 2.0 |
| 6 | 3 200 | 672 | 22 | 3.4 |
| 7 | 3 500 | 751 | 101 | 15.5 |
| 8 | 4 000 | 854 | 204 | 31.4 |
鉴于横波速度对检测深度上的影响较大,被测结构的横波波速的获取就显得尤为重要。文章通过两种方式获取测试范围的横波波速,一种是利用超声横波三维成像仪测试计算,另一种是通过测试网格节点处纵波波速值,利用纵横波转换公式计算横波波速。其中直接测试横波速度较困难且成本较高,不如纵波速度获取容易,所以可通过研究纵、横波速度的转换关系获取横波速度。利用超声横波三维成像仪测试计算的横波波速如图5所示,可见其平均值为3 190 m·s−1。笔者利用超声纵波速度测试仪测试纵波速度,其测试原理如图7(a)所示,获取信号在A,B点间的传播时间,测试结果如图7(b)所示,测试时默认结构体表层介质均匀,且A,B点间无裂纹。
参考CASTAGNA[式(2)]、SMITH[式(3)]、甘利灯[式(4)]、李庆忠等的研究成果[3-7],选取适合混凝土结构纵、横波速的转换公式,即

式中:VP为纵波波速;VS为横波波速。
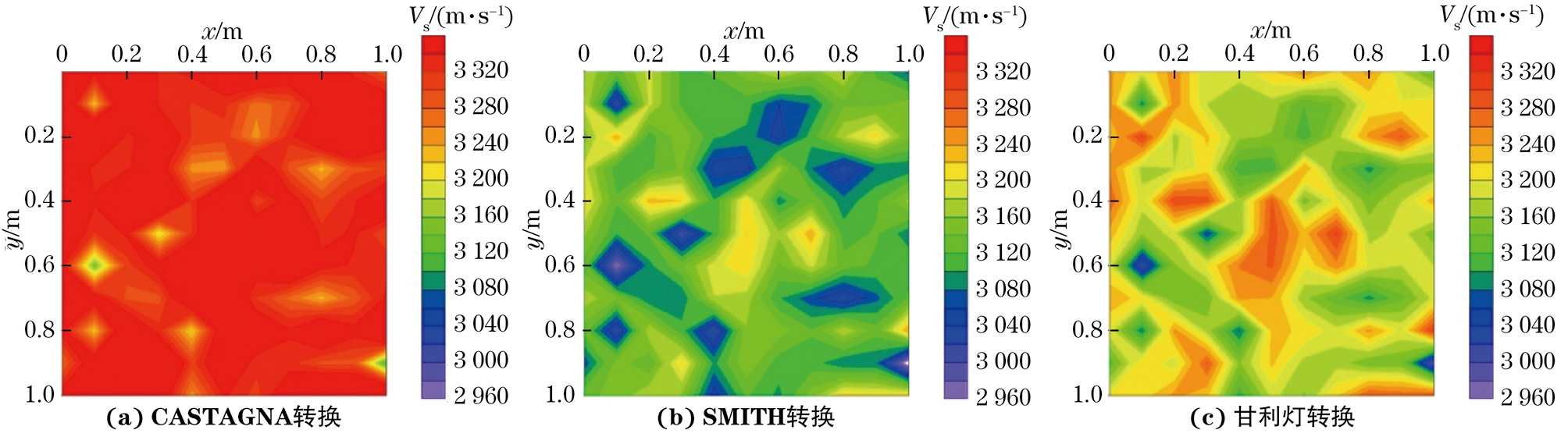
利用上述公式把测区的纵波速度转换为横波波速,转换结果如图8所示,并计算测区范围内横波波速的平均值后与超声横波三维成像仪的测试结果对比,利用式(5)计算转换横波速度的中误差,即

式中:M为通过公式转换横波速度的误差;n为参与计算的横波速度总数;
计算结果如表2所示,表中超声横波三维成像仪测试的横波波速平均值为3 191 m·s−1。可以看出,甘利灯公式转换结果与测试结果最接近,测试中误差也最小,满足测试需求。
| 项目 | 转换方法 | ||
|---|---|---|---|
| CASTAGNA | SMITH | 甘利灯 | |
| 转换横波波速平均值/(m · s−1) | 3 351 | 3 128 | 3 193 |
| 与测试平均值差值/(m · s−1) | 160 | 63 | 2 |
| 测试中误差M/(±m · s−1) | 78 | 87 | 77 |
文章通过设定不同发射频率,总结频率对检测结果的影响规律。超声波在混凝土构件内部传播过程中的能量衰减主要包括扩散衰减、散射衰减和吸收衰减,除随着传播距离衰减外,其衰减系数与频率呈线性强相关关系[8-12],相关性可以表示为
式中:α为衰减系数;γ为常数,与混凝土介质的品质因子有关;f为发射频率。
从超声横波剖面图中可以看出,发射频率越低,衰减系数越小,穿透厚度越大;发射频率越高,衰减系数越大,穿透厚度越小。不同预设频率下检测结果偏差统计如表3所示,可以看出,除设定的100 kHz频率的检测厚度能力偏弱,检测结果偏差略大外,其他设定频率对检测厚度结果准确性的影响较小。
| 序号 | 预设频率/kHz | 结构厚度检测值/mm | 与实际厚度差值/mm | 差值百分比/% |
|---|---|---|---|---|
| 1 | 10 | 650 | 0 | 0.0 |
| 2 | 30 | 634 | -16 | -2.5 |
| 3 | 40 | 651 | 1 | 0.2 |
| 4 | 50 | 663 | 13 | 2.0 |
| 5 | 60 | 681 | 31 | 4.8 |
| 6 | 80 | 693 | 43 | 6.6 |
| 7 | 100 | 698 | 48 | 7.4 |
同时,频率与分辨能力相关,频率越高,波长越短,可分辨尺度越小;频率越低,波长越长,分辨能力越弱。不同预设频率下的超声横波剖面图如图9所示,可见发射频率为10 kHz时,整体分辨率较低,浅部钢筋的轮廓也相对模糊,当发射频率为40~60 kHz时,均可得到较高的分辨率与穿透厚度。
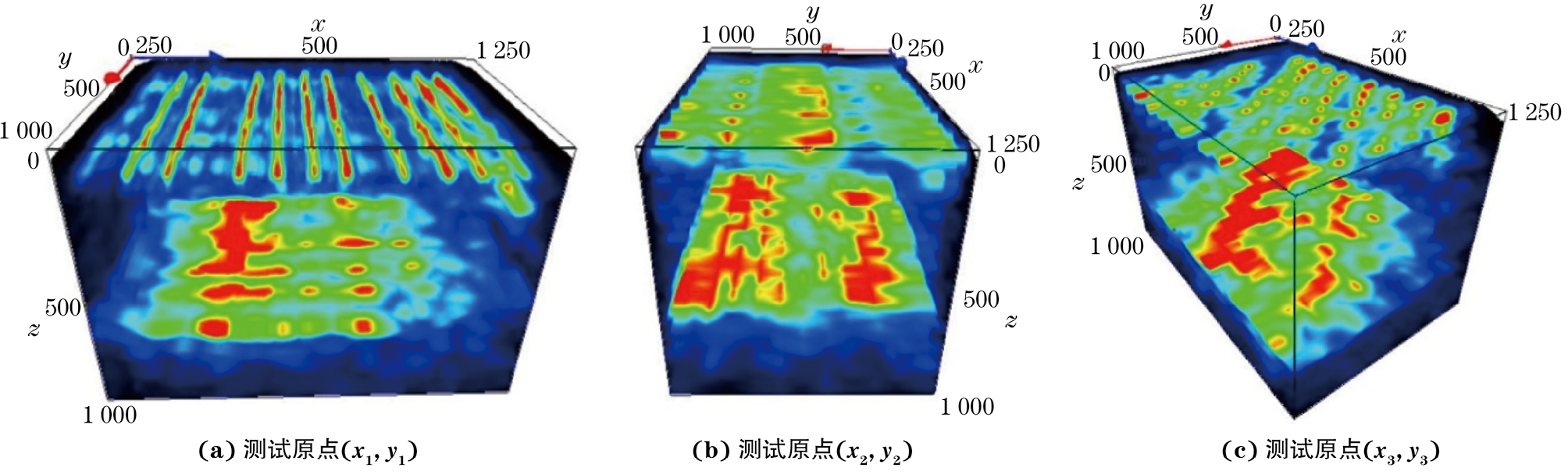
利用超声横波三维成像技术开展混凝土构件检测时,网格设置方向与内部结构走向的关系影响着检测结果。通过设定不同方向的网格,使测试方向(仪器长轴为x方向)与内部检测目标走向呈平行、垂直、斜交关系。测区范围布置方式及布置现场如图10所示,测试网格原点分别为(x1,y1),(x2,y2),(x3,y3)。
不同测试方向时的超声横波三维检测结果如图11所示。从图11(a),(b)可以看出,当测试方向与内部钢筋走向垂直时,聚焦效应最显著,图中垂向钢筋成像清晰;当测试方向与内部钢筋走向平行时,聚焦效应最弱,测试原点在(x1,y1)、(x2,y2)处的两种测试方式,与测试方向平行的钢筋均无明显反应。当测试原点在(x3,y3)处时,测试方向与内部钢筋走向呈斜交关系,由图11(c)可以看出,虽然B扫描图中能识别出钢筋,但是在三维结果图中,受成像算法影响,同一根钢筋的信号连续性较差,较难判断钢筋的分布情况。
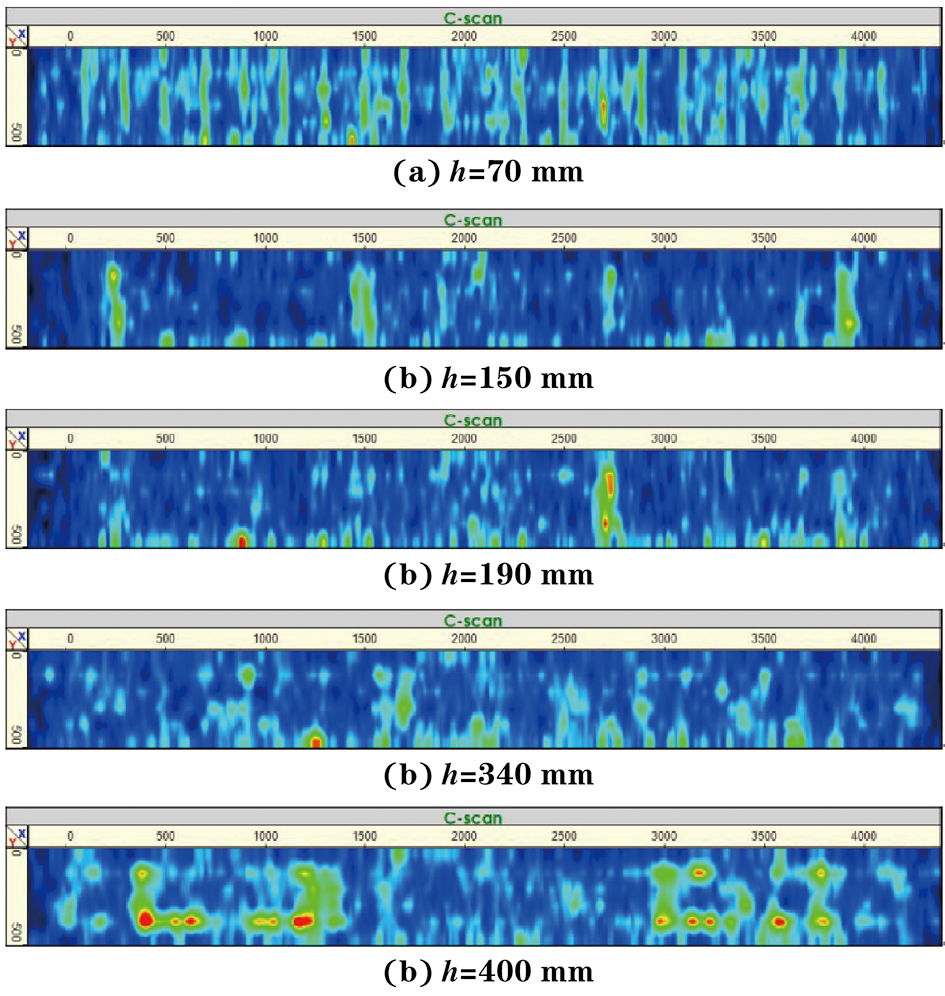
预埋管试件实物如图12所示,其结构尺寸为4.6 m×0.6 m×0.4 m(长×宽×高),预埋3层空管,其中上下两层钢管直径为55 mm,埋深为50 mm(距上下两侧);中间层PVC管道直径为110 mm,从左至右埋深依次为145,130,175,150 mm。
3层管道及结构底板对应深度的C扫描结果如图13所示。由图13(a)可以看出首层管道反射信号较强,对管道的平面位置、埋深及尺寸都有较高的检测精度;图13(b),(c)能清晰反映中间层管道,平面位置、埋深的检测精度也较高;图13(d)对应第三层管道深度,管道的反射信号较弱;图13(e)结构底板中间部分反射信号较弱,这是因为该区域开展过载荷试验,分布了竖向细小裂纹,降低了结构强度,超声波信号能量损失较多。
方形截面钢管混凝土实物如图14所示,其结构截面尺寸为150 mm×150 mm(长×宽),钢管壁厚为3 mm。
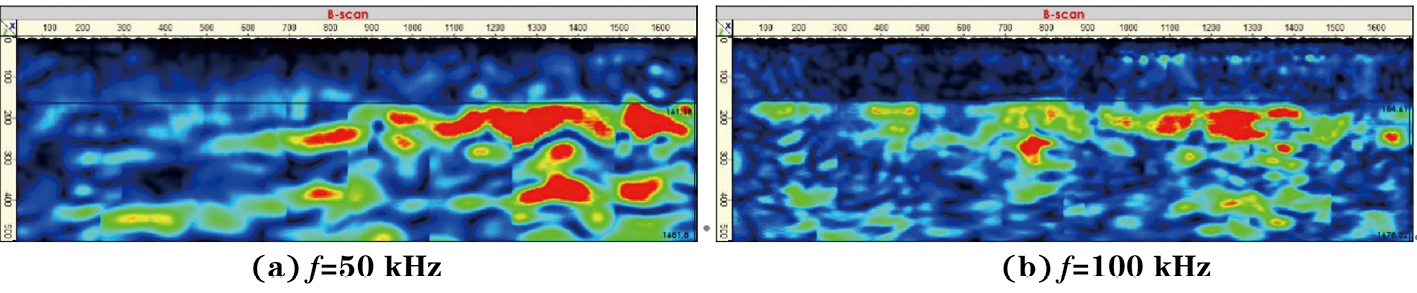
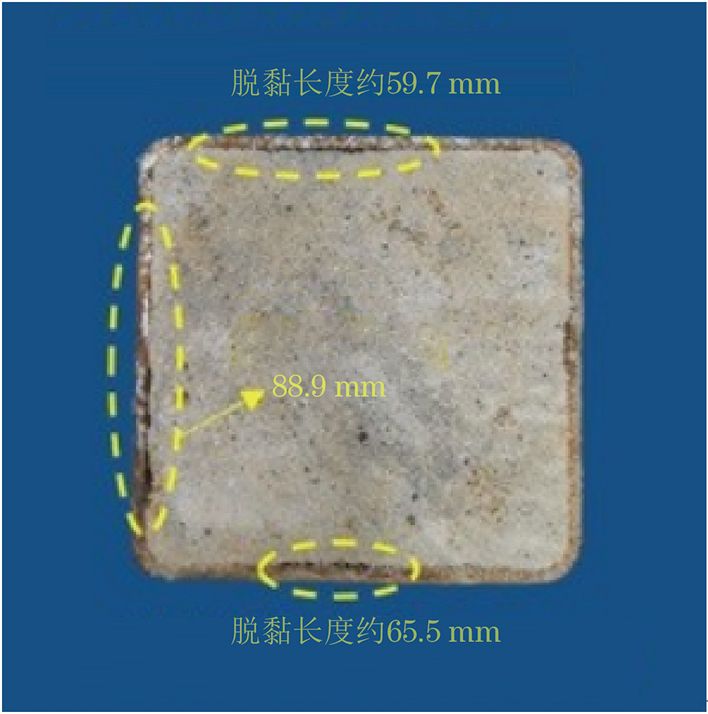
因钢管混凝土结构厚度小,检测精度要求高,方形截面钢管混凝土B扫描结果如图15所示,发射频率f分别为50 kHz和100 kHz。由图15(a)可知图像底界面反射信号较弱,厚度(161 mm)检测也存在较大偏差;由图15(b)可知图像底界面反射信号强,厚度(154 mm)检测精度高。除厚度检测精度的差异,在结构内部细节展现方面,100 kHz结果图也明显优于50 kHz结果图,可以判识脱黏和不密实等病害,1 100 mm处截面脱黏缺陷的验证结果如图16所示。
(1)结构模型中声速设定的偏差会造成厚度检测结果的偏差,在速度偏差量相同的情况下,设定值大于实际速度造成的检测厚度偏差量更大;当设定速度低于实际速度30%时,结构内部分辨率也会降低。
(2)可通过在测区范围均匀布设测点获取纵波速度,利用甘利灯所提转换公式计算横波速度。
(3)低频信号有利于穿透大尺度结构,高频信号探测能力有限但对结构内部的分辨能力更强,对同一结构不同深度的检测目标,可采取多频率组合测试方式来取得理想检测效果。
(4)测试方向与内部结构走向正交时,聚焦成像效果最佳。结合结构设计文件与目标体走向设置测试网格,必要时可以对正交两个方向分别开展测试,尽量避免测试方向与目标体走向斜交,造成资料解释的困难。